{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Drahtlose Energieübertragung und Datenkommunikation
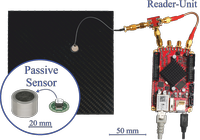 Im Themenfeld der drahtlosen Energieübertragung und Kommunikation sind sowohl elektromagnetische Verfahren als auch Ultraschall-basierte Ansätze etabliert. Elektromagnetische Verfahren eignen sich vor allem für oberflächennahe Implantate, während Ultraschall auch tieferliegende Implantate adressieren kann und darüber hinaus Kommunikation durch elektrisch leitfähige Materialien wie Metall ermöglicht.
Im Themenfeld der drahtlosen Energieübertragung und Kommunikation sind sowohl elektromagnetische Verfahren als auch Ultraschall-basierte Ansätze etabliert. Elektromagnetische Verfahren eignen sich vor allem für oberflächennahe Implantate, während Ultraschall auch tieferliegende Implantate adressieren kann und darüber hinaus Kommunikation durch elektrisch leitfähige Materialien wie Metall ermöglicht.
Publikationen:
- T. Schaechtle, G. K. J. Fischer, J. Helmerich, I. Häring, F. Höflinger, and S. J. Rupitsch, “Advancements in Low-Power Ultrasonic-Based Wake-Up Through Metal,” IEEE J. Radio Freq. Identif., vol. 9, pp. 956–966, Nov. 2025, doi: 10.1109/JRFID.2025.3637587
- T. Schaechtle, H. Köhler, J. Helmerich, G. K. J. Fischer, A. Gabbrielli, F. Höflinger, and S. J. Rupitsch, “Energieeffiziente akustische Kommunikation durch Metall für drahtlose Sensoranwendungen,” tm – Technisches Messen, vol. 90, no. S1, pp. S103–S107, 2023, doi: 10.1515/teme-2023-0077
- T. Schaechtle, T. Aftab, L. M. Reindl, and S. J. Rupitsch, “Wireless Passive Sensor Technology through Electrically Conductive Media over an Acoustic Channel,” Sensors, vol. 23, no. 4, Art. no. 2043, 2023, doi: 10.3390/s23042043
- J. Helmerich, T. Schaechtle, M. Wich, B. Szabo, T. Stieglitz, and S. J. Rupitsch, “Implementation of an Ultrasonic-Based Link for Percutaneous Communications,” Curr. Dir. Biomed. Eng., vol. 9, no. 1, pp. 170–173, 2023, doi: 10.1515/cdbme-2023-1043
- S. Stoecklin, A. Yousaf, G. Gidion, L. Reindl, and S. J. Rupitsch, “Simultaneous Power Feedback and Maximum Efficiency Point Tracking for Miniaturized RF Wireless Power Transfer Systems,” Sensors, vol. 21, no. 6, Art. no. 2023, 2021, doi: 10.3390/s21062023
Ansprechpartner:
Thomas Schaechtle Prof. Dr. Stefan J. Rupitsch
Funk- und Radarsensorik - Rettung und Personensuche mittels drohnengestützter Radarortung
 Bei der Rettung von Menschen in Katastrophenszenarien, wie beispielsweise Lawinenabgängen oder Gebäudeeinstürzen, ist eine schnelle Ortung und Bergung von Überlebenden von entscheidender Bedeutung, um deren Überlebenschancen zu erhöhen.
Hierbei ermöglichen drohnengestützte Radarsysteme die Detektion sowohl elektronischer Geräte als auch menschlicher Vitalzeichen in Form atmungsbedingter Thoraxbewegungen.
Bei der Rettung von Menschen in Katastrophenszenarien, wie beispielsweise Lawinenabgängen oder Gebäudeeinstürzen, ist eine schnelle Ortung und Bergung von Überlebenden von entscheidender Bedeutung, um deren Überlebenschancen zu erhöhen.
Hierbei ermöglichen drohnengestützte Radarsysteme die Detektion sowohl elektronischer Geräte als auch menschlicher Vitalzeichen in Form atmungsbedingter Thoraxbewegungen.
Publikationen:
- D. M. Spale, G. Gidion, T. Schaechtle, and S. J. Rupitsch, “Numerical Modeling of Radar-based Vital Sign Detection in Debris Sites for Sparse Frequency Excitations,” in Proc. 2025 22nd European Radar Conf. (EuRAD), Utrecht, Netherlands, Sep. 24–26, 2025, doi: 10.23919/EuRAD65285.2025.11234190
- M. Schabinger, T. Schaechtle, G. K. J. Fischer, F. Höflinger, and S. J. Rupitsch, “Harmonic Response Characterization of Mobile Devices for Application in Avalanche Rescue,” in Proc. 2025 55th European Microwave Conf. (EuMC), Utrecht, Netherlands, Sep. 23–25, 2025, doi: 10.23919/EuMC65286.2025.11235153
- D. Shi, G. Gidion, T. Aftab, L. M. Reindl, and S. J. Rupitsch, “Frequency Comb-Based Ground-Penetrating Bioradar: System Implementation and Signal Processing,” Sensors, vol. 23, no. 3, Art. no. 1335, 2023, doi: 10.3390/s23031335
Ansprechpartner:
Dominik Spale Moritz Schabinger
Gunnar Gidion Fabian Höflinger Prof. Dr. Stefan J. Rupitsch
Umweltsensorik - LoRa Backscattering und Chlorophyll Sensorik
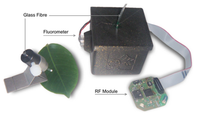 Ein Forschungsschwerpunkt liegt auf der Entwicklung eines kostengünstigen Chlorophyll-Fluoreszenzsensors auf Basis der Pulse-Amplitude-Modulation (PAM). Darüber hinaus wird eine energieeffiziente drahtlose Kommunikationslösung auf LoRa-Basis entwickelt, bei der ein Low-Power-Backscattering-Ansatz zur zuverlässigen Datenerfassung und -übertragung zum Einsatz kommt.
Ein Forschungsschwerpunkt liegt auf der Entwicklung eines kostengünstigen Chlorophyll-Fluoreszenzsensors auf Basis der Pulse-Amplitude-Modulation (PAM). Darüber hinaus wird eine energieeffiziente drahtlose Kommunikationslösung auf LoRa-Basis entwickelt, bei der ein Low-Power-Backscattering-Ansatz zur zuverlässigen Datenerfassung und -übertragung zum Einsatz kommt.- S. Baghbani, A. Sarlak, and S. Rupitsch, “Monitoring the quantum yield efficiency of Photosystem II,” in Proc. SMSI 2025 Conf. – Sensor and Measurement Science International, Nürnberg, Germany, May 6–8, 2025, pp. 119–120, doi: 10.5162/SMSI2025/B7.1
- S. Baghbani, U. Akcok, C. Stock, C. Werner, and S. J. Rupitsch, “Development of a Low-Cost, Autonomous Pulse Amplitude Modulated (PAM) Chlorophyll Fluorometer for In-Situ Monitoring of Photosystem II Efficiency,” arXiv preprint arXiv:2511.13580, Nov. 2025, doi: 10.48550/arXiv.2511.13580
- T. Steinmann, F. Riedel, T. Schaechtle, and S. J. Rupitsch, “Development of an Ultra-Low-Power Bidirectional LoRa Backscatter Tag,” in Proc. 2025 IEEE Int. Instrum. Meas. Technol. Conf. (I2MTC), Chemnitz, Germany, May 19–22, 2025, pp. 1–6, doi: 10.1109/I2MTC62753.2025.11078945
Till Steinmann Samaneh Baghbani Prof. Dr. Stefan J. Rupitsch
Multimodale Lokalisierung (Im Innenraum und unter GNSS-denial)
Lokalisierungsdienste sind ein wichtiger Teil unseres modernen Lebens. Im Außenraum sorgen globale 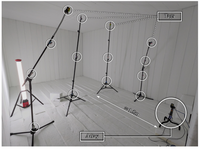 Navigationssatellitensysteme (GNSS) wie GPS oder Galileo dafür, dass Nutzer sich weltweit selbst lokalisieren können. Diese Signale werden jedoch durch die Atmosphäre stark gedämpft und können von Endgeräten am Boden nur sehr schwach empfangen werden; in Innenräumen ist dies meist überhaupt nicht möglich. Zusätzlich kommt hinzu, dass diese Signale im Außenbereich leicht gestört (sog. Denial) oder verfälscht werden können. Daher sind neue Ansätze erforderlich, die nicht nur Anforderungen an die Genauigkeit, sondern auch an Skalierbarkeit, Verlässlichkeit und Wirtschaftlichkeit erfüllen. Untersucht werden dabei Technologien wie akustische Lokalisierung, Bluetooth, Wi-Fi oder Ultra-Wideband (UWB) in Kombination mit zeitversatz-, phasen-, Dead-Reckoning- und richtungsbasierten Techniken, um optimale Konfigurationen zu erreichen.
Navigationssatellitensysteme (GNSS) wie GPS oder Galileo dafür, dass Nutzer sich weltweit selbst lokalisieren können. Diese Signale werden jedoch durch die Atmosphäre stark gedämpft und können von Endgeräten am Boden nur sehr schwach empfangen werden; in Innenräumen ist dies meist überhaupt nicht möglich. Zusätzlich kommt hinzu, dass diese Signale im Außenbereich leicht gestört (sog. Denial) oder verfälscht werden können. Daher sind neue Ansätze erforderlich, die nicht nur Anforderungen an die Genauigkeit, sondern auch an Skalierbarkeit, Verlässlichkeit und Wirtschaftlichkeit erfüllen. Untersucht werden dabei Technologien wie akustische Lokalisierung, Bluetooth, Wi-Fi oder Ultra-Wideband (UWB) in Kombination mit zeitversatz-, phasen-, Dead-Reckoning- und richtungsbasierten Techniken, um optimale Konfigurationen zu erreichen.
Publikationen:
- G. K. J. Fischer et al., "A Systematic Survey and Comparative Analysis of Angular-Based Indoor Localization and Positioning Technologies," in IEEE Communications Surveys & Tutorials, vol. 28, pp. 3830-3869, 2026, doi: 10.1109/COMST.2025.3567765
- G. K. J. Fischer et al., "Evaluation of Sparse Acoustic Array Geometries for the Application in Indoor Localization," in IEEE Journal of Indoor and Seamless Positioning and Navigation, vol. 2, pp. 263-274, 2024, doi: 10.1109/JISPIN.2024.3476011
- G. K. J. Fischer et al., "Evaluation of a Smart Mobile Robotic System for Industrial Plant Inspection and Supervision," in IEEE Sensors Journal, vol. 24, no. 12, pp. 19684-19697, 15 June15, 2024, doi: 10.1109/JSEN.2024.3390622
- G. K. J. Fischer et al., "MASSLOC: A Massive Sound Source Localization System Based on Direction-of-Arrival Estimation and Complementary Zadoff–Chu Sequences," in IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1-13, 2025, Art no. 8512713, doi: 10.1109/TIM.2025.3606066
- A. Gabbrielli et al., "An Echo Suppression Delay Estimator for Angle-of-Arrival Ultrasonic Indoor Localization," in IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1-12, 2021, Art no. 6503612, doi: 10.1109/TIM.2021.3083558
- F. Höflinger et al., "Acoustic Self-calibrating System for Indoor Smartphone Tracking (ASSIST)," 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 2012, pp. 1-9, doi: 10.1109/IPIN.2012.6418877
- R. Zhang, F. Hoflinger and L. Reindl, "Inertial Sensor Based Indoor Localization and Monitoring System for Emergency Responders," in IEEE Sensors Journal, vol. 13, no. 2, pp. 838-848, Feb. 2013, doi: 10.1109/JSEN.2012.2227593
- F. Höflinger, J. Müller, R. Zhang, L. M. Reindl and W. Burgard, "A Wireless Micro Inertial Measurement Unit (IMU)," in IEEE Transactions on Instrumentation and Measurement, vol. 62, no. 9, pp. 2583-2595, Sept. 2013, doi: 10.1109/TIM.2013.2255977